 |
 |
Robotics projects
Autonomous navigation with LIDAR (2010)
 |
This project provided mapping and trajectory planning features to the | 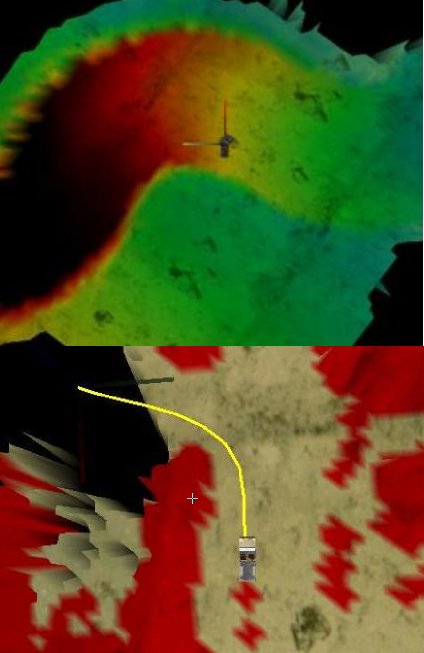 |
Self localization and mapping (2011)
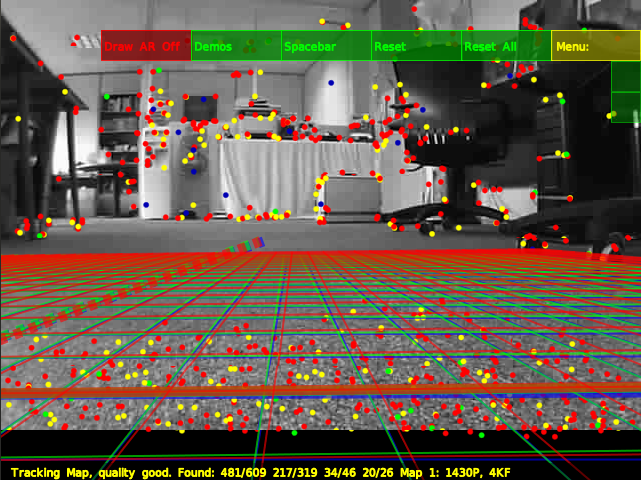 |
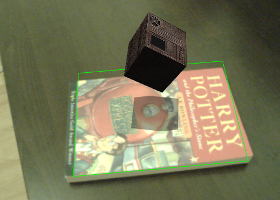
Integration of a then state-of-the-art self localization and mapping algorithm into a robotic suite for Awabot's Emox robotic suite. Emox is an educational package built around the Emox/Sparx robotic platform. It includes modules to create augmented reality, programming and navigation applications. IV-devs' role was to create a simultaneous localization and mapping module using the PTAMM algorithm. This allowed autonomous navigation and extended greatly the robot's capacities. |  |
Crowd counting using HD video streams (2011)
The goal of this open source project was to evaluate the number of persons in a crowd. There was at the time no fully automated software for this task. HeadCounter uses a Haar classifier to find faces in a crowd and tracks them individually to evaluate the rate of the flow and the total size of the crowd. HeadCounter is available on Github |
Vision and navigation in elevators for a Fetch robot (2017)
 |
Fetch robots are originally designed for warehouses. If they ever need to change floor, they typically have to be linked to a centralized elevator controller. This project demonstrated that using vision and the robot's arm, regular elevators could be used normally. It used the Fetch's internal 3D camera for navigation and a deep learning model (YOLOv2) for recognition of elevator buttons. |
Vision and movement logic for a Cobotta arm robot (2019)
| The Cobotta is a light collaborative robot arm with a high movement precision. It was used in a demonstration to show how easily new deep learning models could be plugged into a production line. It used DeepLearning4Java and a cutomized YOLOv2 model. |  |
Fae-bot: an agriculture automation experiment (on-going)
 |
The goal of this project is to explore the usability of suspended robots in agriculture automation. Suspended robots offer a compromize between wheeled robots and multicopters as well as being potentially more affordable than either option. This project led to a colaboration with Machine Learning Tokyo, who subsequently published a paper about a deeplearning control model for suspended robots (paper). | 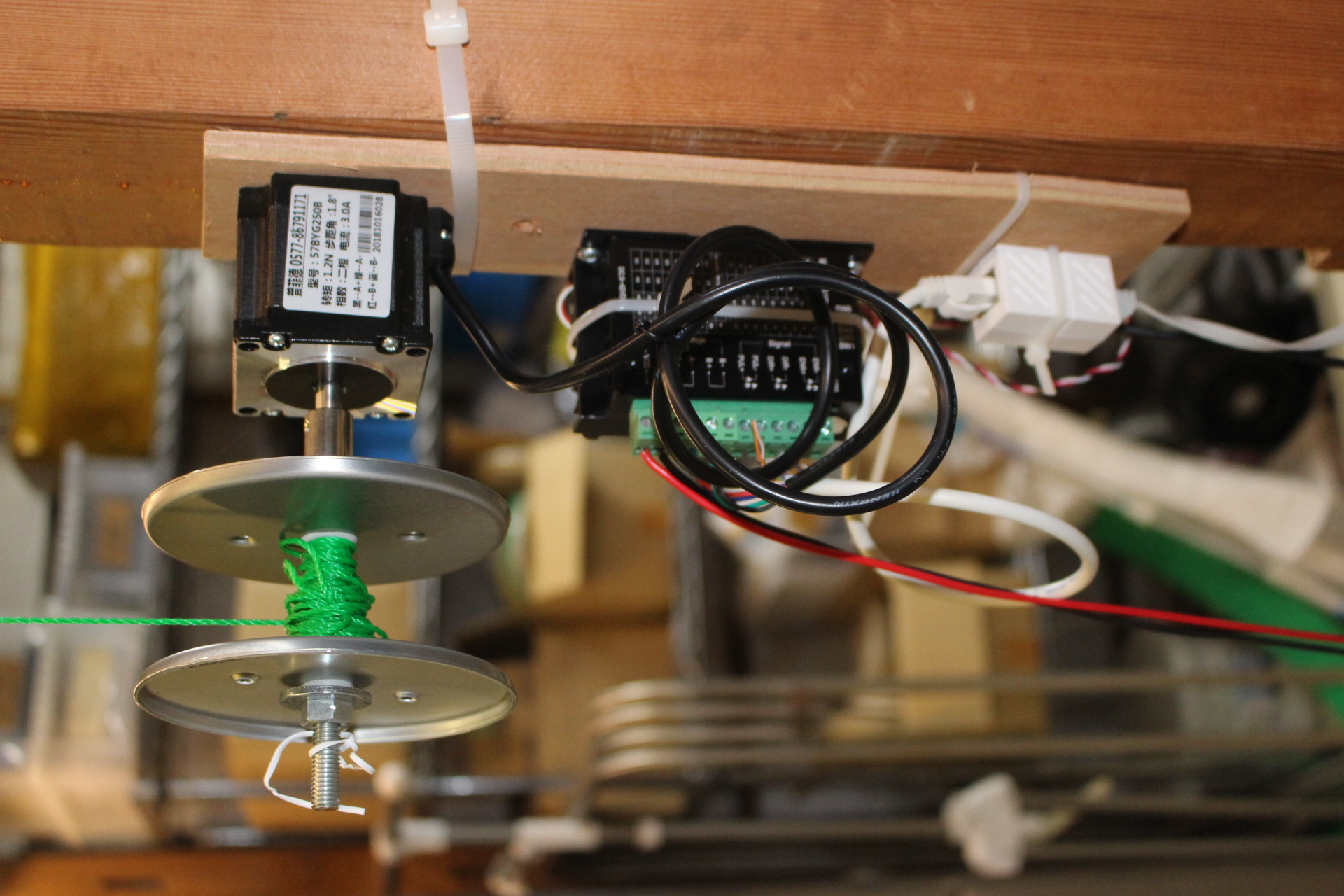 |